
Einsatz von maschinellem Lernen zur Klassifizierung der Brückeninfrastruktur in Punktwolkendaten
Mit dem technologischen Fortschritt haben sich Punktwolken zu einer beliebten Vermessungsmethode für das Infrastrukturmanagement entwickelt. Sie bieten die Möglichkeit, aus der Ferne auf schwer zugängliche Bereiche zuzugreifen. Durch Analyse, Visualisierungs-Werkzeuge und maschinelles Lernen können Punktwolken analysiert werden, um verschiedene Bedingungen und Eigenschaften eines Vermessungsstandorts zu verstehen und einzuschätzen. Punktwolkenerhebungen enthalten oft Tausende, wenn nicht sogar Millionen von Punkten, die detaillierte Positionsinformationen, Attributdaten und mehr für einen Erhebungsort erfassen.
Die manuelle Ableitung von Informationen aus diesen großen Datensätzen kann eine mühsame Aufgabe sein. Die Anwendung eines Klassifizierungstyps auf jeden Punkt verleiht den Daten eine strukturelle Bedeutung. Automatische Klassifizierungsmethoden zur Identifizierung von Standard-Elementen wie Boden und Vegetation sind allgemein verfügbar und unglaublich nützlich, um gemeinsame Elemente in jeder Punktwolke zu finden.
Bei der Vermessung von Bauwerken und vielen anderen Objekten sind automatische Klassifizierungswerkzeuge in solchen branchenspezifischen Szenarien möglicherweise nicht ausreichend. In solchen Fällen können Techniken des maschinellen Lernens angewendet werden, um automatisch einzigartige Elemente zu erstellen, die nicht Teil des Standard-Merkmal-Satzes sind. Das preisgekrönte Trainingswerkzeug für benutzerdefinierte Klassifizierungen von Global Mapper Pro ermöglicht die Erstellung von benutzerdefinierten Klassifizierungen, mit denen Ziel-Elemente innerhalb einer Punktwolke automatisch identifiziert werden können.
Diese Brücke wurde mit terrestrischem LiDAR vermessen. (Daten mit freundlicher Genehmigung der Firma SSMC)
Der in diesem Beispiel verwendete terrestrische Lidar-Scan einer Brücke wurde von einem unserer Nutzer, der Southeastern Surveying and Mapping Corporation, aufgenommen. Dieser hochauflösende Datensatz hat alle Winkel der Brücke sauber erfasst und bietet eine klare Darstellung der Elemente.

Werkzeuge zur automatischen Klassifizierung
Global Mapper verfügt seit Jahren über eine Reihe integrierter automatischer Klassifizierungswerkzeuge zur Identifizierung von Boden-, Vegetations-, Gebäude-, Mast- und Leitungspunkten. Mit dem Ziel, zusätzliche benutzerdefinierte Klassifizierungen zu erstellen, können diese automatischen Werkzeuge verwendet werden, um vor dem Training einer Klassifizierung Punkte herauszufiltern, die nicht zu den Zielmerkmalen gehören.
Für jedes Werkzeug stehen verschiedene Methoden zur Verfügung, um unterschiedliche Punktwolken und Element-Typen besser zu erfassen. Die Max-Likelihood-Methode, eine Methode des maschinellen Lernens, wurde für hochauflösende und terrestrische Punktwolken entwickelt, die häufig im Infrastrukturmanagement verwendet werden. Max Likelihood ist eine segmentierungsbasierte Methode. Für jeden Klassifizierungstyp wurde das Werkzeug so zugeschnitten, dass es Cluster von Punkten findet, die die gemeinsamen Formen und Eigenschaften dieser Elemente in der Punktwolke aufweisen.
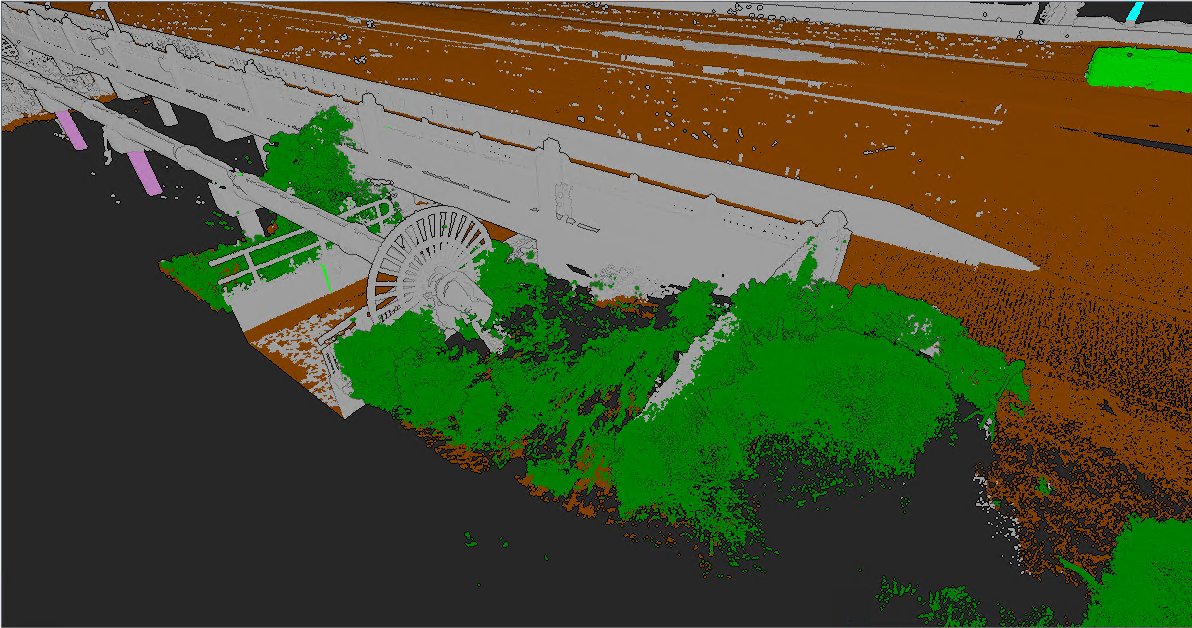
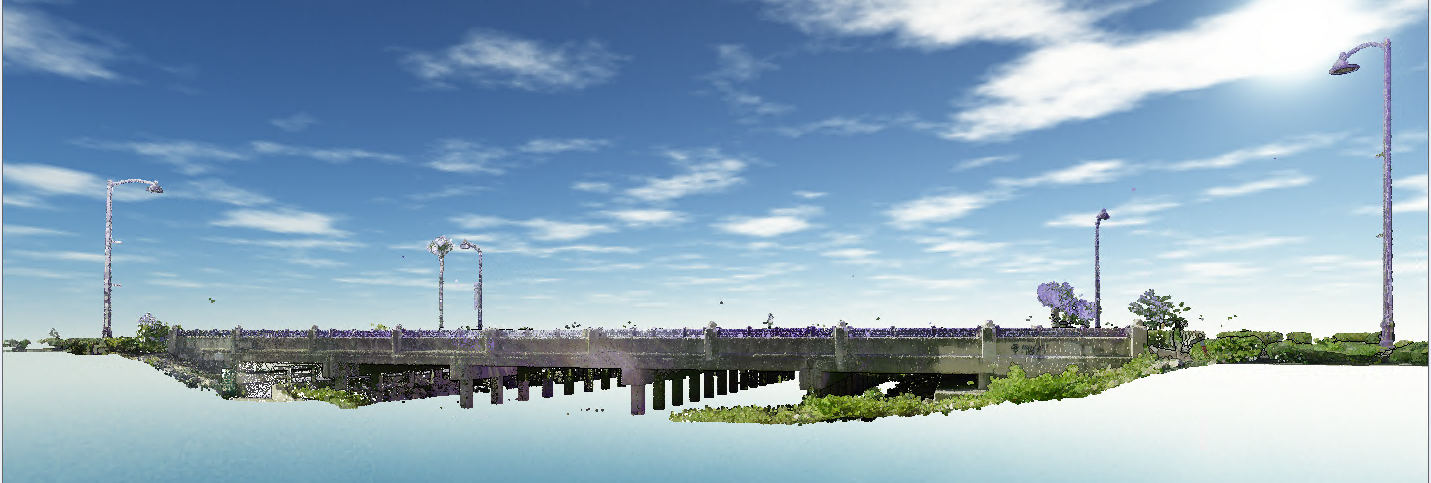
In dieser Punktwolke wurde das Werkzeug zur Vegetationsklassifizierung verwendet, um Bewuchs und Büsche zu identifizieren (links). Klassifizierte Punkte können leicht herausgefiltert werden, wodurch die darunter liegende Infrastruktur sichtbar wird (rechts).
*Tipp: Sie haben eine Klassifizierung vorgenommen und möchten es noch einmal mit anderen Einstellungen versuchen? Verwenden Sie die Rückgängig-Funktion (STRG+Z), um Änderungen im Arbeitsbereich rückgängig zu machen.
Filtern von Punktwolken
Der Ausschluss irrelevanter Punkte aus der benutzerdefinierten Klassifizierungsverarbeitung erhöht nicht nur die Genauigkeit der Klassifizierungen, sondern verkürzt auch die Verarbeitungszeit, da weniger Punkte berücksichtigt werden müssen. Es gibt viele Methoden zum Filtern von Punkten, wobei zwei am häufigsten verwendet werden: Filtern nach Klassifikation und Festlegen von Grenzen.
Das Werkzeug LiDAR-Daten filtern kann Punkte auf der Grundlage ihrer Klassifizierung auf Arbeitsbereichsebene von der Verarbeitung ausschließen. Dies verhindert nicht nur, dass die Punkte verarbeitet werden, sondern deaktiviert sie auch in der Datenansicht.
Das Deaktivieren von Klassifizierungen in einem Arbeitsbereich ist auch an anderen Stellen in der Software nützlich, z. B. beim Erstellen von Höhenraster und beim Exportieren von Daten. Um Punkte von der Klassifizierung auszuschließen, ohne sie im Arbeitsbereich zu deaktivieren, verwenden Sie die Schaltfläche Punkte filtern im Werkzeug Automatische Punktwolkenanalyse selbst.
Eine weitere Filteroption im Automatische Punktwolkenanalyse Werkzeug ist die geografische Filterung über die Festlegung von Grenzen. Dadurch wird das Werkzeug auf ein bestimmtes Gebiet beschränkt, so dass nur die benötigten Daten verarbeitet werden können. Darüber hinaus ist die Konzentration auf einen kleinen Teilbereich der Daten eine hervorragende Methode zur Fehlersuche bei Klassifizierungseinstellungen für jede Klassifizierung.

Die Grenzen können manuell festgelegt werden, wie hier gelb hervorgehoben.
Die benutzerdefinierten Klassifizierungswerkzeuge
Standardmäßige automatische Klassifizierungen identifizieren Objekte in Punktwolken auf der Grundlage ihrer Attribute und Strukturen. Jedes Werkzeug ist so aufgebaut, dass es nach bestimmten Arten von Strukturen in den Daten sucht, um das zu finden, was es klassifizieren soll. So sucht das Werkzeug zur Bodenklassifizierung beispielsweise nach Eigenschaften in Punkten wie Bereichen mit geringen Höhenunterschieden, dem Last Return usw.
Benutzerdefinierte Klassifizierungswerkzeuge arbeiten nach einem ähnlichen Prinzip, aber die Attribute und Strukturen, nach denen sie in den Daten suchen, basieren auf den Punktclustern, auf denen sie trainiert wurden. Diese Trainingsdaten werden vom Benutzer in der Punktwolke identifiziert. Es wird empfohlen, vor dem Training eine geometrische Segmentierung durchzuführen.
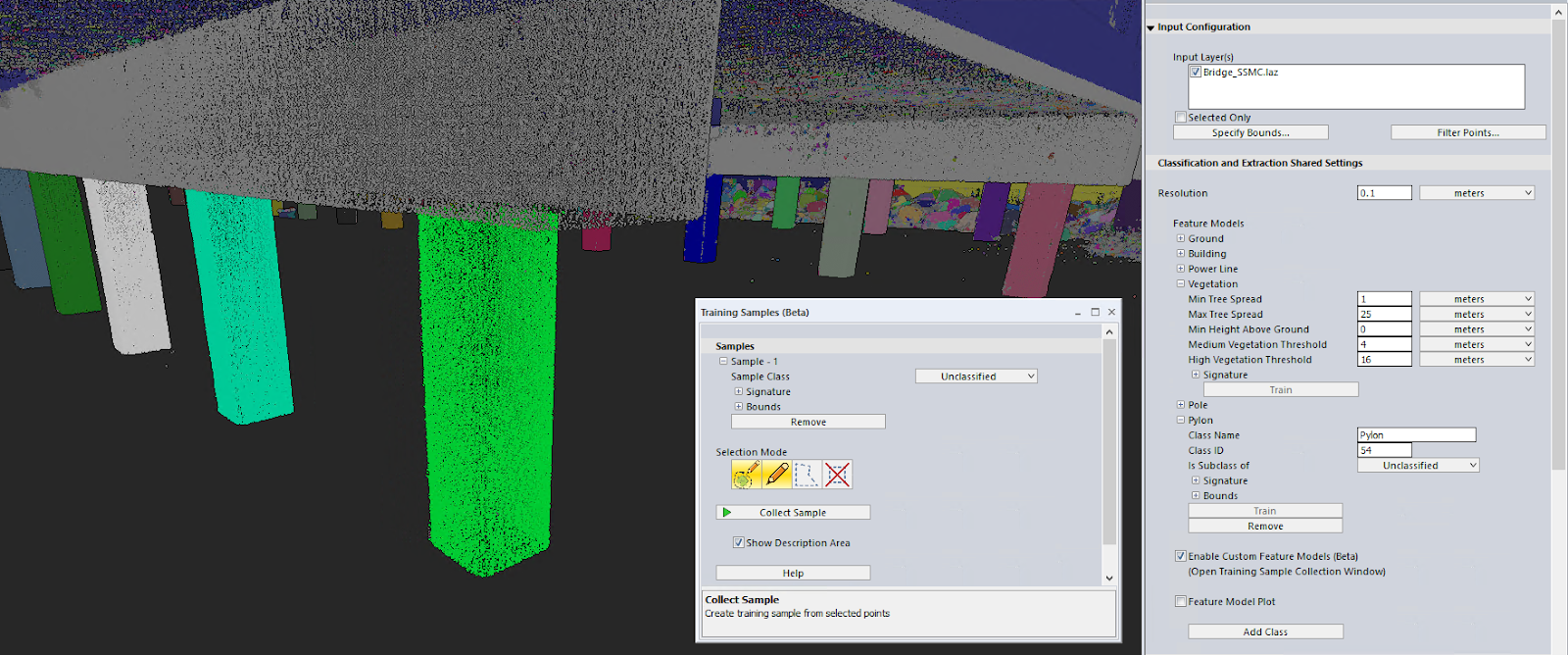
Diese hochauflösenden Daten sind ein hervorragendes Beispiel für die Schulung benutzerdefinierter Klassifizierungswerkzeuge zur Identifizierung von Brückenstrukturen wie Pylonen, Geländern und Straßenlaternen.
Klassifizierungen auf der Grundlage der Segmentierung
Die benutzerdefinierte Klassifizierung verwendet dieselbe auf maschinellem Lernen basierende Segmentierungsanalyse wie die integrierten Max-Likelihood-Klassifizierungen, um die Eigenschaften der Punktwolke zu bewerten und Gemeinsamkeiten zwischen den Punkten zu finden, aus denen ein Objekt besteht. Um beispielsweise Farbstreifen auf der Straße zu segmentieren, würde ein Benutzer nach Punkten suchen, die eine flache Oberfläche bilden, die gleiche Farbe, Normalwerte usw. haben.
Bei dieser Methode wird davon ausgegangen, dass jedes Objekt in der Punktwolke, jede Gruppe von Punkten, die mit der Segmentierungsanalyse identifiziert wurde, eine Signatur aus Attributen und/oder Strukturen aufweist, die es von seinen Nachbarn unterscheidet. Das Werkzeug zur benutzerdefinierten Klassifizierung von Punktwolken macht sich diese Signaturen zunutze, um spezifische und einzigartige Elemente in einer Punktwolke zu klassifizieren. Beim Training der Klassifizierung hilft die Auswahl von Punkten nach Segmenten, um sicherzustellen, dass alle Punkte ähnliche Signaturen aufweisen.
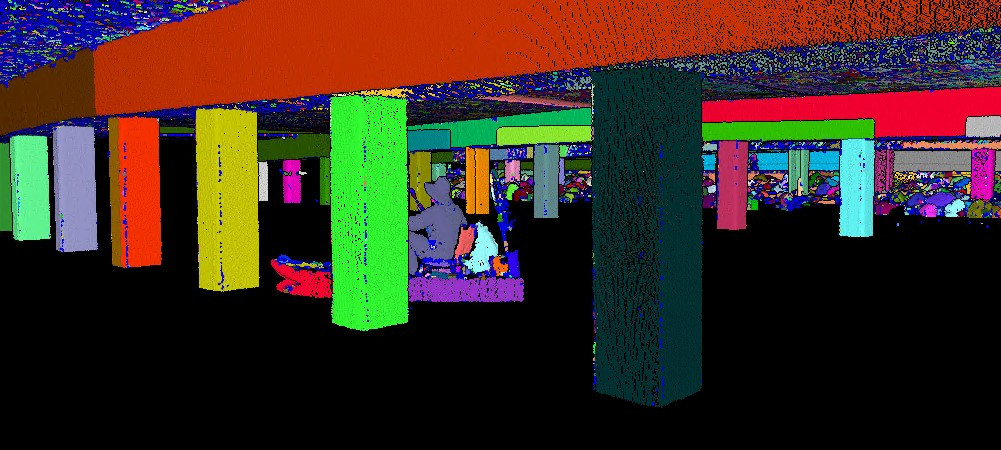
Die Segmentierung kann verwendet werden, um separate Elemente in der Punktwolke auf der Grundlage ihrer Signatur zu erstellen. Jedem Segment wird eine andere, zufällige Farbe zugewiesen.
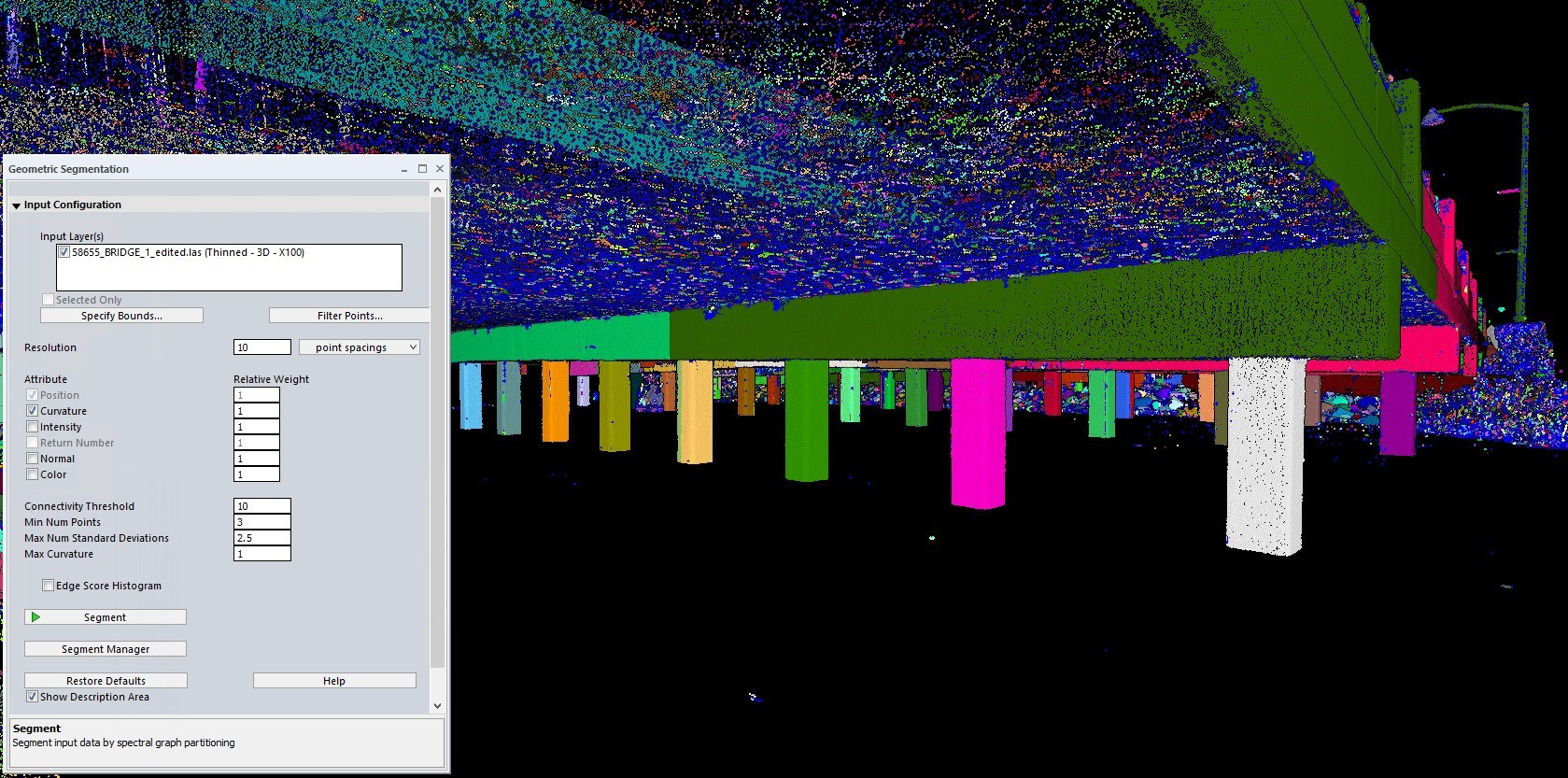
Es ist üblich, verschiedene Segmentierungseinstellungen zu verwenden, um verschiedene Objekttypen zu identifizieren, da diese höchstwahrscheinlich eindeutige Signaturen haben. Das Dialogfeld in der obigen Abbildung zeigt die Signaturattribute an, die allen Punkten, aus denen die Pylone bestehen, gemeinsam sind. Die Krümmung ist das wichtigste Attribut, da alle Pylone flach sind und in einem 90-Grad-Winkel enden, in dem sie mit der Brücke verbunden sind.
Weitere Informationen zur Segmentierung finden Sie in den unten aufgeführten Blogs. Die Dialogfelder entsprechen früheren Versionen, die Einstellungswerte sind jedoch unverändert:
Erstellen von Trainings-Beispielen
Ein benutzerdefiniertes Klassifizierungswerkzeug wird auf der Grundlage ausgewählter Segmente oder Punktcluster trainiert. Diese ausgewählten Cluster werden bewertet, um Muster in den Attributen und den Grenzen oder der Gesamtform zu erfassen. Wenn ein Werkzeug trainiert ist, kann seine Signatur als numerische Daten oder als Balkendiagramm in der Element-Modelldarstellung angezeigt werden. Es werden mehrere Attribute bewertet.
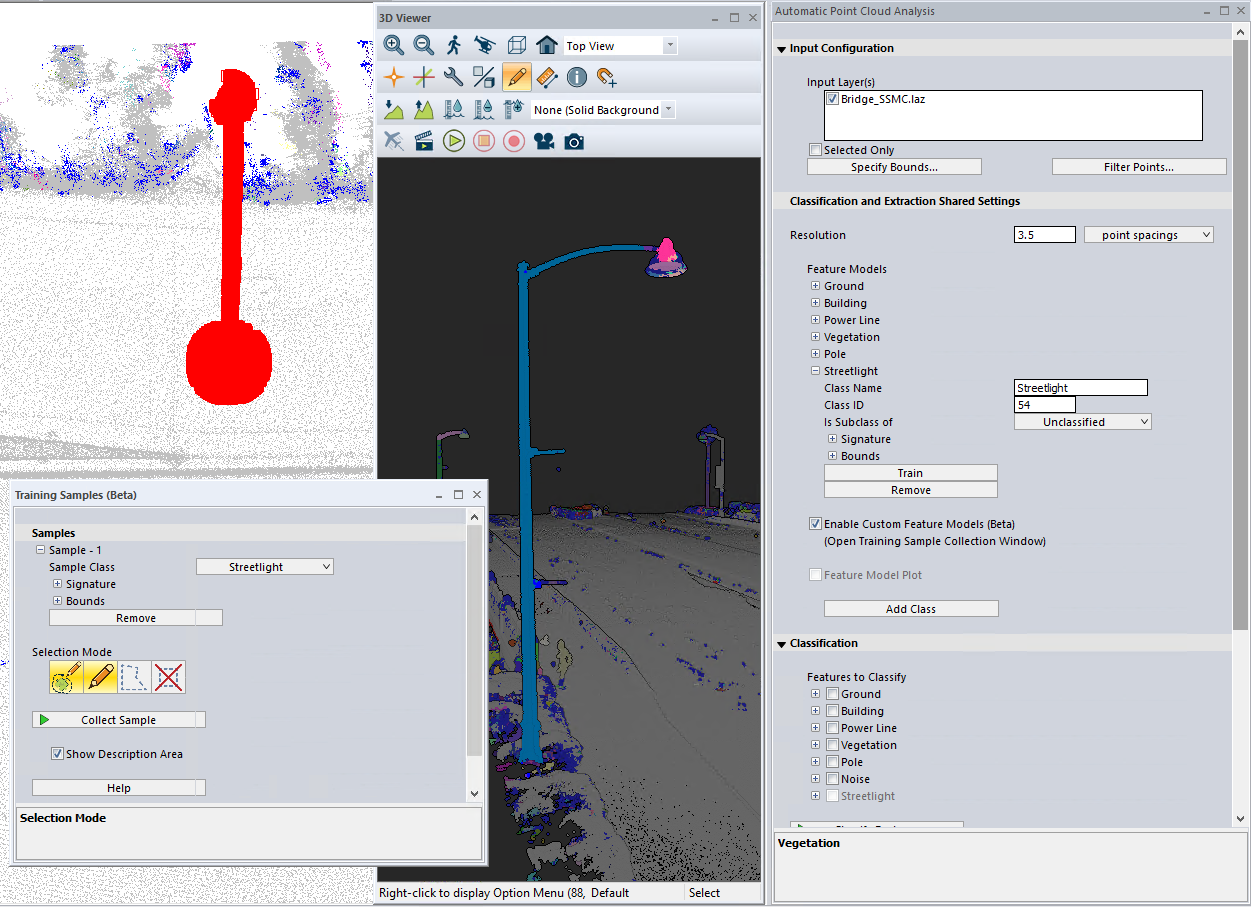
Das Attribut Hauptkomponente misst die 3D-Form der Punkte auf der Ebene der Nachbarschaft (die Nachbarschaft wird durch das Feld Auflösung oben im Dialogfeld festgelegt). Diese betrachten das Element oder das Segment der Punkte als Ganzes. In der Abbildung unten wird beispielsweise eine neue Klassifizierung für Straßenlaternen erstellt, um diese gebogenen, hohen Strukturen in den Daten zu identifizieren. Bei der Anwendung segmentiert das benutzerdefinierte Werkzeug die Daten, um Elemente mit einer ähnlichen Form zu finden, wie sie durch Hauptkomponenten-Messungen bestimmt wurde.
Eigentrophie misst die Entropie der Punktwolke. Zum Beispiel ist die Entropie in einer flachen Oberfläche sehr niedrig, aber in der Vegetation ist sie hoch. Die Krümmung analysiert die Kurven, die von den Punkten in einer lokalen Nachbarschaft erzeugt werden. Übereinstimmende Krümmungswerte weisen darauf hin, dass die Punkte wahrscheinlich zu demselben Objekt gehören. Die Normale misst die Richtung senkrecht zur Oberfläche, die der Punkt repräsentiert. Ähnliche Normalwerte in einem lokalen Bereich weisen darauf hin, dass die Punkte ein einheitlich geformtes Element darstellen.
Die Werkzeuge 3D-Viewer und Pfadprofil bieten zusätzliche Perspektiven für die Auswahl von Daten.
Element-Modell Plot
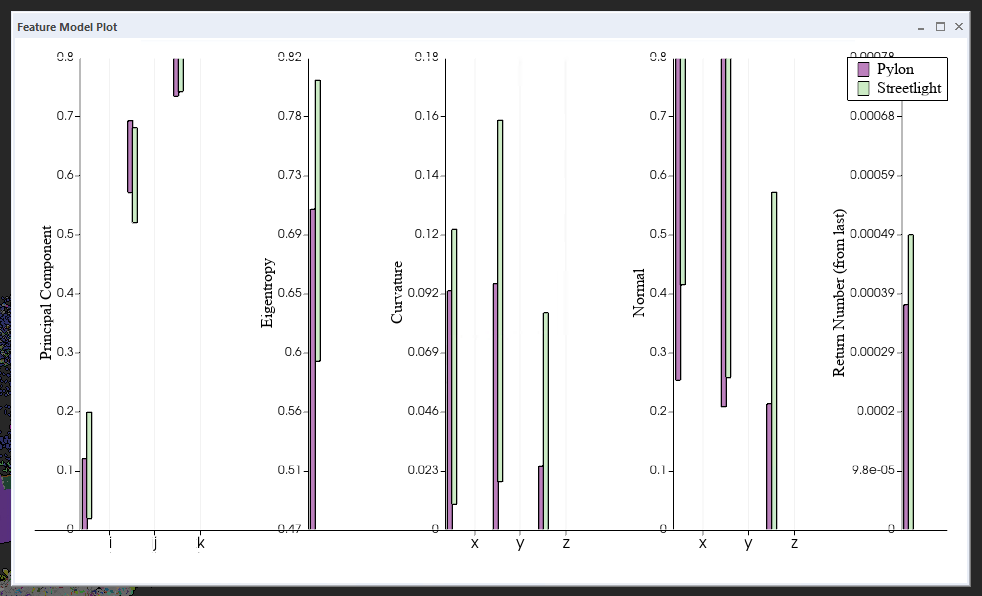
Der Element-Modell Plot kann zum Vergleich von Signaturen zwischen Klassen verwendet werden.
Klassifizierungssignaturen werden im Element-Modell-Plot visuell dargestellt. Dieses Balkendiagramm hebt einige der Variablen hervor, die bei der Suche nach Elementen in einer Punktwolke bewertet werden. Punktwolkensegmente mit Wert-Eigenschaften, die in die beschriebenen Bereiche fallen, werden klassifiziert. Hier ist zu sehen, wie sich die Klassifizierungen von Masten und Straßenlaternen pro Attribut unterscheiden.
Die Funktion des maschinellen Lernens für benutzerdefinierte Klassifizierungen bietet auch die Möglichkeit, Beispiele zu sammeln und bestehende Klassifizierungen zu trainieren: Boden, Gebäude usw.. Anstatt mit einer neuen Klassifizierung bei Null zu beginnen, können Sie die vorhandenen Klassen trainieren, um bestimmte Element-Typen zu identifizieren, z. B. Gebäude mit einzigartigen Formen. Erweitern Sie im Abschnitt Gemeinsame Einstellungen für Klassifizierung und Extraktion ein beliebiges Element-Modell und klicken Sie auf Trainieren, um den Prozess zu starten.
Blue Marble Geographics wurde mit dem Outstanding Innovation in LiDAR Award für die Entwicklung einer bahnbrechenden neuen Funktion für das Training benutzerdefinierter automatischer Punktwolkenklassifizierungen ausgezeichnet. Die benutzerdefinierte Klassifizierung durch maschinelles Lernen in Global Mapper Pro öffnet die Tür für eine bessere Zugänglichkeit und Anwendung von LiDAR und Punktwolken in vielen Branchen ohne hohe Kostenbarrieren.