
Geländeoberfläche erstellen - Rastertypen
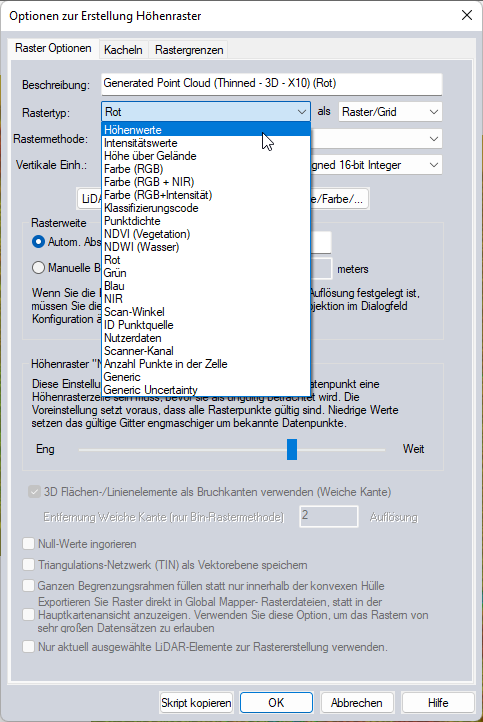
Innerhalb des Dialogs zur Erstellung von Geländeoberflächen gibt es die Option, verschiedene Rastertypen auszuwählen.
Übersicht Rastertypen
Diese Option wird bei der Rasterung von Lidar-Daten angezeigt. Standardmäßig werden die Höhenwerte ausgewählt. Mit dem Lidar-Modul können Raster auch aus zusätzlichen Attributen der 3D-Punkte erstellt werden.
- Höhenwerte - Dies ist der Standard-Gittertyp. Damit wird ein Geländeraster aus den Höhenwerten erstellt.
- Intensitätswerte - Erzeugt ein Raster aus den Intensitätswerten. Der Intensitätswert in einer Lidar-Punktwolke misst die Stärke des Signals, das vom Lidar-Impuls zum Sensor zurückkehrt. Die Intensität des Rücklaufs ist auf das Reflexionsvermögen der vom Impuls getroffenen Oberfläche zurückzuführen.
- Höhe über dem Boden - Speichern Sie den berechneten Wert für die Höhe über dem Boden als Geländeraster und nicht als absolute Höhe. Im ausgegebenen Geländeraster stellt ein Wert von 0 den Boden dar.
- Farbe (RGB) - Es wird ein Orthophoto aus den RGB-Werten der Punktwolke erstellt. Dieses wird anhand der Farbe des höchsten Punktes in der Punktwolke in jedem Rasterabstand berechnet.
- Farbe (RGB+Intensität) - Es wird ein Orthophoto aus RGB-Farben plus Intensität als 4-Band erstellt
- Farbe (RBG+NIR) - Es wird ein Orthophoto der RGB-Farben plus NIR als 4-Band erstellt.
- Farbe (RGB+Intensität) - Es wird ein Orthophoto aus RGB-Farben plus Intensität als 4-Band-Bild erstellt.
- NDVI (Vegetation) - Dies erfordert Punktwolkendaten mit RGB- und auch NIR-Werten. Damit wird der berechnete NDVI-Wert gerastert.

Beispiel: Rastertyp NDVI aus einer Punktwolke mit NIR-Kanal

- NDWI (Wasser) - Hierfür sind Punktwolkendaten mit RGB- und auch NIR-Werten erforderlich. Damit wird der berechnete NDWI-Wert gerastert.
- Punktdichte - Hier wird die für jeden Punkt berechnete Punktdichte gerastert. Siehe auch Dichte-Raster (Heat Map) aus Punktdaten erstellen
- Klassifizierungscodes - Damit wird ein Raster der Klassencodes erstellt. Dies kann wie LULC- oder Clutter-Rasterdaten verwendet werden.
- Rot - Es wird ein Orthophoto aus dem Farbattribut Rot der Punktwolke erstellt (Einzelband).
- Grün - Es wird ein Orthophoto aus dem Farbattribut Grün der Punktwolke erstellt (Einzelband).
- Blau - Es wird ein Orthophoto aus dem Farbattribut Blau der Punktwolke erstellt (Einzelband).
- NIR - Es wird ein Orthophoto aus dem Attribut Nahinfrarot (NIR) der Punktwolke erstellt. (Einzelband).
- Scan-Winkel - Es wird ein Orthophoto aus dem Attribut Scan Angle der Punktwolke erstellt.
- ID Punktquelle - Es wird ein Orthophoto aus dem Attribut Point Source ID der Punktwolke erstellt.
- Nutzerdaten - Hiermit wird ein Orthophoto aus den Werten der Benutzerdaten in der Punktwolke erstellt.
- Scanner-Kanal - Hiermit wird ein Orthophoto erstellt, das das Attribut Scanner Channel aus der Punktwolke darstellt.
- Anzahl Punkte in der Zelle - Es wird ein Orthophoto erstellt, das die Anzahl der einzelnen Lidar-Punkte in einer Zelle darstellt.