
Klassifizierung von Strommasten in Punktwolken mit Global Mapper Pro
Da Global Mapper Pro über ein Werkzeug zur Klassifizierung von Strommasten verfügt, können wir uns ansehen, wie das herkömmliche Segmentierungswerkzeug zur Klassifizierung anderer Merkmale, z. B. komplexerer elektrischer Strukturen, verwendet werden kann. Beispielsweise können Sendemasten in einer Punktwolke nicht mit dem integrierten Werkzeug zur Klassifizierung von Masten klassifiziert werden, da dieses Werkzeug nur nach zylindrischen Strukturen sucht.
Es gibt jedoch eine andere Möglichkeit, sie zu klassifizieren. Elemente in Punktwolken, wie z. B. Sendemasten, haben einen "Fingerabdruck", der aus Merkmalen oder Attributen besteht, mit denen sie von anderen Punkten in der Punktwolke unterschieden werden können. Das Segmentierungswerkzeug in Global Mapper Pro kann auf der Grundlage dieser gemeinsamen Attribute Punktcluster identifizieren.
In diesem Blog wird der Prozess der Klassifizierung von Strommasten in Punktwolken beschrieben, wobei Global Mapper als Beispiel für die Verwendung des Segmentierungstools dient.
Strommasten können in Global Mapper Pro mit dem Segmentierungswerkzeug identifiziert und klassifiziert werden.
Vor der Klassifizierung der Strommasten kann es sinnvoll sein, zunächst Rausch-, Erd- und Leitungspunkte (in dieser Reihenfolge) zu klassifizieren, um Punkte, die nicht zu den Masten gehören, auszuschließen. Verwenden Sie nach der Klassifizierung das Lidar-Daten filtern Werkzeug, um klassifizierte Punkte zu deaktivieren und sie von der Verarbeitung auszuschließen.
Was ist Segmentierung überhaupt?
Bei der Segmentierung handelt es sich um eine Lidar-Klassifizierungsmethode, bei der Punkte auf der Grundlage gemeinsamer Attribute zu Gruppen oder "Clustern" zusammengefasst werden. Ihr Ziel ist es, "Dinge, die Dinge sind" zu gruppieren; zum Beispiel ist ein Auto ein Ding, ein Baum ist ein Ding, die Farbstreifen auf einer Straße, der Bürgersteig oder eine bestimmte Grasart. So gut wie alles, was einen anderen "Fingerabdruck" von Attributen als seine Nachbarn hat, kann mit dem Segmentierungswerkzeug klassifiziert werden. Genauere Informationen finden Sie in der Knowledge Base.
Bei der Auswahl der zu verwendenden Attribute aus der Liste im Segmentierungswerkzeug sollten Sie diejenigen auswählen, die im gesamten Element ähnlich sind. Sie müssen nicht exakt sein, denn mit der Einstellung Standardabweichung können Sie angeben, wie groß der Wertebereich eines erkannten Elements sein darf. Unten sehen Sie ein Beispiel für ein unerwünschtes Attribut für unsere Aufgabe:
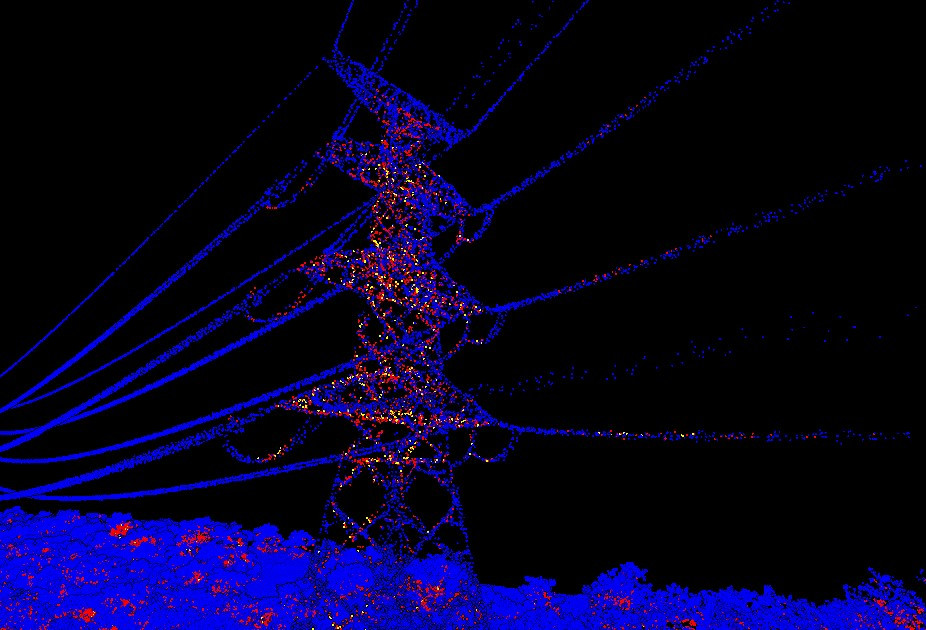
Die Lidar-Punkte in diesem Turm haben eine Vielzahl von Return Nummer-Werten, so dass dieses Attribut bei der Segmentierung für diesen Turm nicht verwendet werden sollte.
Segmentierung von Strommasten
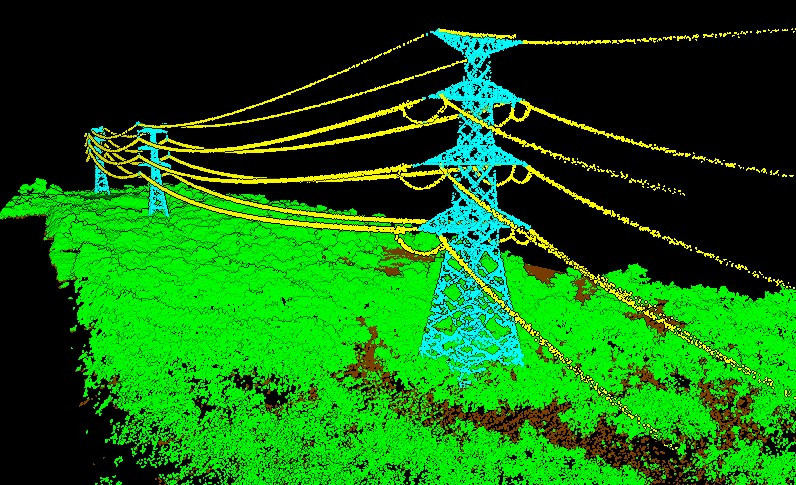
Sendemasten sind ein hervorragendes Beispiel für die Verwendung des Segmentierungswerkzeugs, da sie in der Regel aus relativ gleichem Material bestehen, so dass sie über die gesamte Struktur hinweg die gleichen Attribute wie Farbe und Intensitätswert aufweisen. Das bedeutet, dass sie einen konsistenten Fingerabdruck über ihre gesamte Struktur aufweisen. Dieser Fingerabdruck besteht aus Attributen, die auf der linken Seite des Segmentierungsdialogs ausgewählt werden können, wie unten dargestellt.

Hier ist ein Ausgangspunkt für die Suche nach Einstellungen zur Segmentierung von Strommasten in Lidar-Daten, die Farbe enthalten.
Hinweise zu den Einstellungen:
Jede Punktwolke ist anders, daher müssen diese Einstellungen wahrscheinlich an Ihre Daten angepasst werden. In diesen Beispieleinstellungen ist die Auflösung größer als normal, weil wir eine große, konsistente Struktur betrachten und kleine Elemente nicht hervorheben wollen. Die Mindestanzahl der Punkte im Segment ist aus demselben Grund niedrig. Die maximale Standardabweichung ist sehr niedrig, da die Struktur von Punkt zu Punkt nur wenig variiert.
Jeder Punkt, der sich signifikant von seinen Nachbarn unterscheidet, ist wahrscheinlich nicht Teil des Turms. Ein hoher Wert für die Standardabweichung ist 3. Der Intensitätswert misst den Reflexionsgrad einer Oberfläche. Genauer gesagt ist die Intensität ein Maß dafür, wie stark das Licht von der Oberfläche des Turms abprallt und zum Sensor zurückkehrt, und basiert normalerweise auf dem Material.
Die Farbe wird stärker gewichtet als die anderen Variablen, da sie dazu beiträgt, den Turm von den Stromleitungen zu unterscheiden, die sich ansonsten sehr ähnlich sind. Bei Punktwolken ohne Farbe klassifizieren Sie zunächst die Hochspannungsleitungen und filtern sie dann vor der Segmentierung heraus. Weitere Informationen über die Bedeutung dieser Einstellungen und ihre Verwendung finden Sie in der Knowledge Base.

Den Segmenten wird eine zufällige Farbe zugewiesen, und manchmal werden sie während der Verarbeitung je nach verfügbarem Computerspeicher gekachelt, wie z. B. der hellgrüne und graue Turm im Hintergrund.
Nach der Segmentierung können Sie einzelne Segmente (auch als Cluster oder Gruppen bezeichnet) auswählen und eine Klassifizierung zuweisen. Verwenden Sie das Werkzeug Segmentauswahl, um die Segmente auszuwählen, und halten Sie die STRG-Taste gedrückt, um mehrere Segmente auszuwählen.
Möchten Sie sehen, ob ein Merkmal in Ihren Lidar-Daten segmentiert werden kann? Schicken Sie sie an GeoHelp@bluemarblgeo.com und verweisen Sie auf diesen Blog!
Testen Sie Global Mapper Pro noch heute mit einer kostenlosen 14-Tage-Testversion! Wenn Sie Fragen haben, kontaktieren Sie uns bitte!